Data Augumentation¶
This notebook show the data augmentation for classification, detection and segmentation.
%matplotlib inline
import matplotlib.pyplot as plt
import numpy as np
from PIL import Image
import tifffile
from torchsat.transforms import transforms_cls, transforms_det, transforms_seg
from torchsat.utils.visualizer import plot_img, plot_bbox, plot_mask
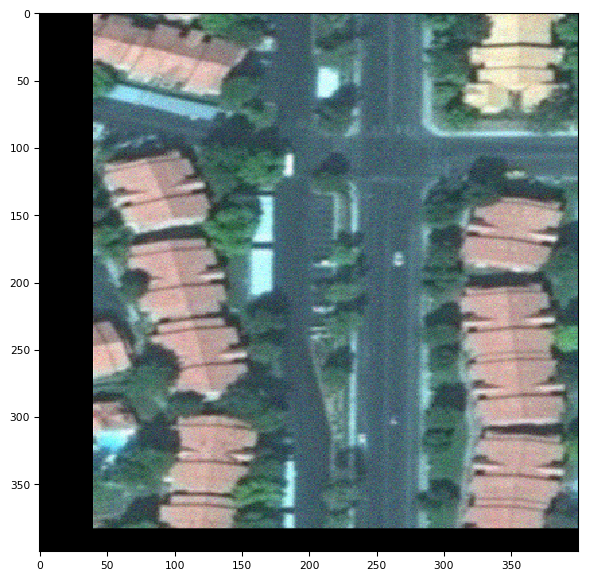
Image classification¶
1. 3 channel image
fp = '../tests/fixtures/different-types/jpeg_3channel_uint8.jpeg'
img = np.array(Image.open(fp))
plot_img(img)
<Figure size 720x576 with 0 Axes>

# apply the classification transform
result = transforms_cls.Compose([
transforms_cls.GaussianBlur(kernel_size=9),
transforms_cls.RandomNoise(),
transforms_cls.RandomHorizontalFlip(p=1),
transforms_cls.RandomShift(max_percent=0.1),
transforms_cls.Resize(400)
])(img)
plot_img(result)
<Figure size 720x576 with 0 Axes>
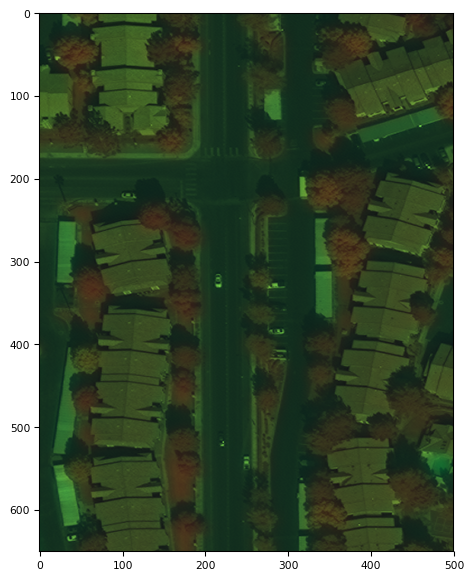
2. 8 channel uint16 tiff image
fp = '../tests/fixtures/different-types/tiff_8channel_uint16.tif'
img = tifffile.imread(fp)
print('image shsape: '.format(img.shape))
plot_img(img, channels=(8,3,1))
image shsape:
<Figure size 720x576 with 0 Axes>
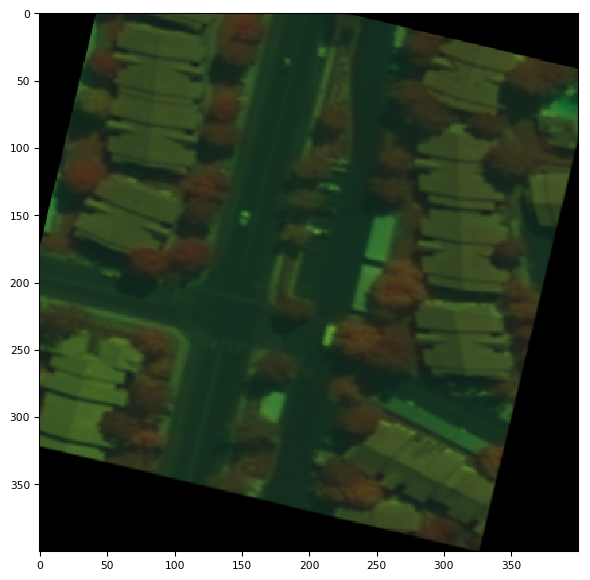
# apply the classification transform
result = transforms_cls.Compose([
transforms_cls.GaussianBlur(kernel_size=9),
transforms_cls.RandomVerticalFlip(p=1),
transforms_cls.RandomShift(max_percent=0.1),
transforms_cls.Resize(400),
transforms_cls.RandomRotation(30),
# transforms_cls.ElasticTransform()
])(img)
plot_img(result, channels=(8,3,1))
<Figure size 720x576 with 0 Axes>
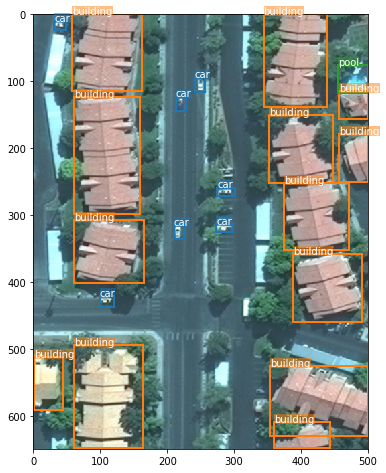
Object detection¶
fp_img = '../tests/fixtures/different-types/jpeg_3channel_uint8.jpeg'
img = np.array(Image.open(fp_img))
bboxes = np.array([
[210, 314, 225, 335],
[273, 324, 299, 337],
[275, 378, 302, 391],
[213, 506, 228, 527],
[241, 534, 257, 556],
[31, 627, 49, 640],
[99, 213, 120, 229],
[61, 1, 164, 155],
[1, 59, 44, 138],
[61, 249, 165, 342],
[61, 352, 159, 526],
[58, 535, 163, 650],
[360, 1, 444, 41],
[354, 19, 500, 124],
[388, 190, 491, 292],
[374, 298, 471, 398],
[352, 398, 448, 500],
[457, 399, 500, 471],
[457, 494, 500, 535],
[344, 512, 439, 650],
[455, 532, 500, 574],
])
labels = [1,1,1,1,1,1,1,2,2,2,2,2,2,2,2,2,2,2,2,2,3]
classes = ['car', 'building', 'pool']
plot_bbox(img, bboxes, labels=labels, classes=classes)

# apply the object detection transform
result_img, result_bboxes, result_labels = transforms_det.Compose([
transforms_det.GaussianBlur(kernel_size=3),
transforms_det.RandomFlip(p=1),
])(img, bboxes, labels)
plot_bbox(result_img, result_bboxes, labels=result_labels, classes=classes)
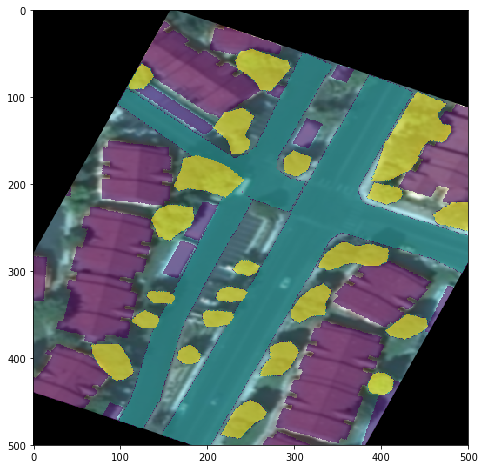
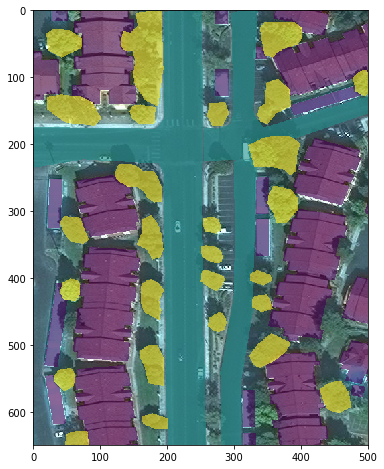
Semantic segmentation¶
fp_img = '../tests/fixtures/different-types/jpeg_3channel_uint8.jpeg'
fp_mask = '../tests/fixtures/masks/mask_tiff_3channel_uint8.png'
img = np.array(Image.open(fp_img))
mask = np.array(Image.open(fp_mask))
plot_mask(img, mask)
# apply the classification transform
result_img, result_mask = transforms_seg.Compose([
transforms_seg.GaussianBlur(kernel_size=9),
transforms_seg.RandomVerticalFlip(p=1),
transforms_seg.RandomShift(max_percent=0.1),
transforms_seg.RandomRotation(30),
transforms_seg.Resize((500,500)),
# transforms_seg.ElasticTransform()
])(img, mask)
plot_mask(result_img, result_mask)